4.6. ED1 y movimiento: servosistemas y motores paso a paso
4.6.1. Introducción
Con la placa ED1, podemos generar movimientos y piezas cinéticas a partir del uso de motores. Los motores más habituales son los servos de 180º y los motores paso a paso. Los dos tipos de motores los podemos encontrar en el kit ED1+Art asociado a la asignatura. La diferencia principal entre estos dos motores es que el servomotor solo puede girar un ángulo de 180º y permite girar a posiciones concretas dentro de este rango. Por otra parte, el motor paso a paso permite hacer giros continuos contando pasos –es decir, impulsos eléctricos– para establecer la precisión del movimiento.
Con el servomotor que tenemos en nuestro kit se pueden hacer actividades muy sugerentes. Lo veremos a continuación mediante un par de ejercicios. Pero, evidentemente, para hacer movimientos sofisticados y robotizaciones, necesitaríamos más de un servosistema o motor. Estos son bastante económicos y fáciles de conseguir por internet o en cualquier tienda de electrónica.
Si revisamos la fitxa del Laboratorio de interactividad sobre motores, sabremos cómo conectar y programar el servosistema. Pero repasémoslo antes de presentar los ejercicios.
Recordemos que los servomotores solo giran 180°, por lo tanto, no tienen que dar una vuelta completa.
Habrá que conectarlos a cualquiera de los pines digitales D1-D4 de la siguiente manera:
- Negro o marrón: pin negativo (-)
- Rojo: pin positivo (+)
- Blanco o naranja: pin de señal (S)
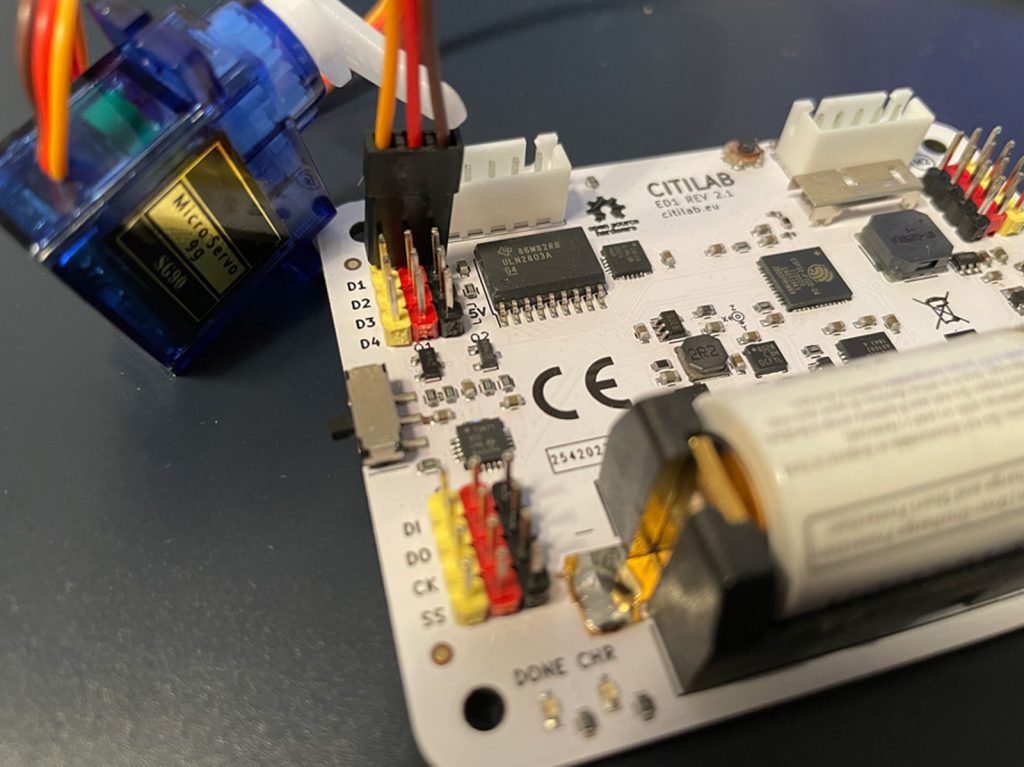
Siempre trabajamos con motores, hemos de tener la batería puesta en el lugar correspondiente de la placa.
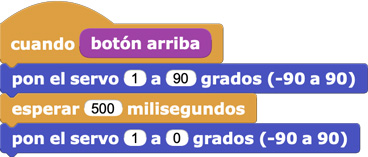
Para programar los servomotores tendremos que añadir la librería Servo.ubl. A continuación podemos ver un ejemplo de cómo activar un servo de 180º por medio de los botones integrados en la placa ED1: